RILIEVO FOTOGRAMMETRICO AD ALTEZZA COSTANTE E QUOTA VARIABILE
Ciao!
In questo articolo e nei video allegati ti mostro come puoi pianificare una missione di volo di un drone facendolo volare ad altezza costante rispetto al terreno, ma a quota variabile. Per farlo ti proporrò due strade diverse che contemplano l’uso di due combinazioni diverse di software:
- Il software open source QGIS e l’applicativo web Mission Hub di Litchi. La soluzione è a basso costo, ma i risultati ottenibili, a mio avviso, sono davvero interessanti.
- Il software Sierrasoft Land ed ancora l’applicativo web Mission Hub di Litchi. In questo caso, a mio avviso, si ottengono dei risultati più attendibili e la procedura è più veloce.
Per pianificare la missione ti metto a disposizione un foglio Excel realizzato da me nel quale trovi inseriti i dati relativi alla fotocamera del DJI Phantom 4 Pro, ma funziona anche per altre fotocamere. Basta inserire i dati corretti. Il foglio Excel pone come dato di partenza il GSD (Ground Sample Distance) ed in base ai parametri che imposterai calcolerà l’altezza di volo massima del drone. La velocità massima in avanzamento e la distanza trasversale tra le strisciate dipendono, invece, dall’intervallo tra gli scatti e dalla percentuale di sovrapposizione tra essi. Non ti spiego la teoria che sta alla base dei calcoli. Puoi trovare le spiegazioni che ti servono in articoli facilmente reperibili su internet. In fondo alla pagina ti lascio i riferimenti del sito di 3DMetrica dove potrai trovare tutto quello che ti serve.
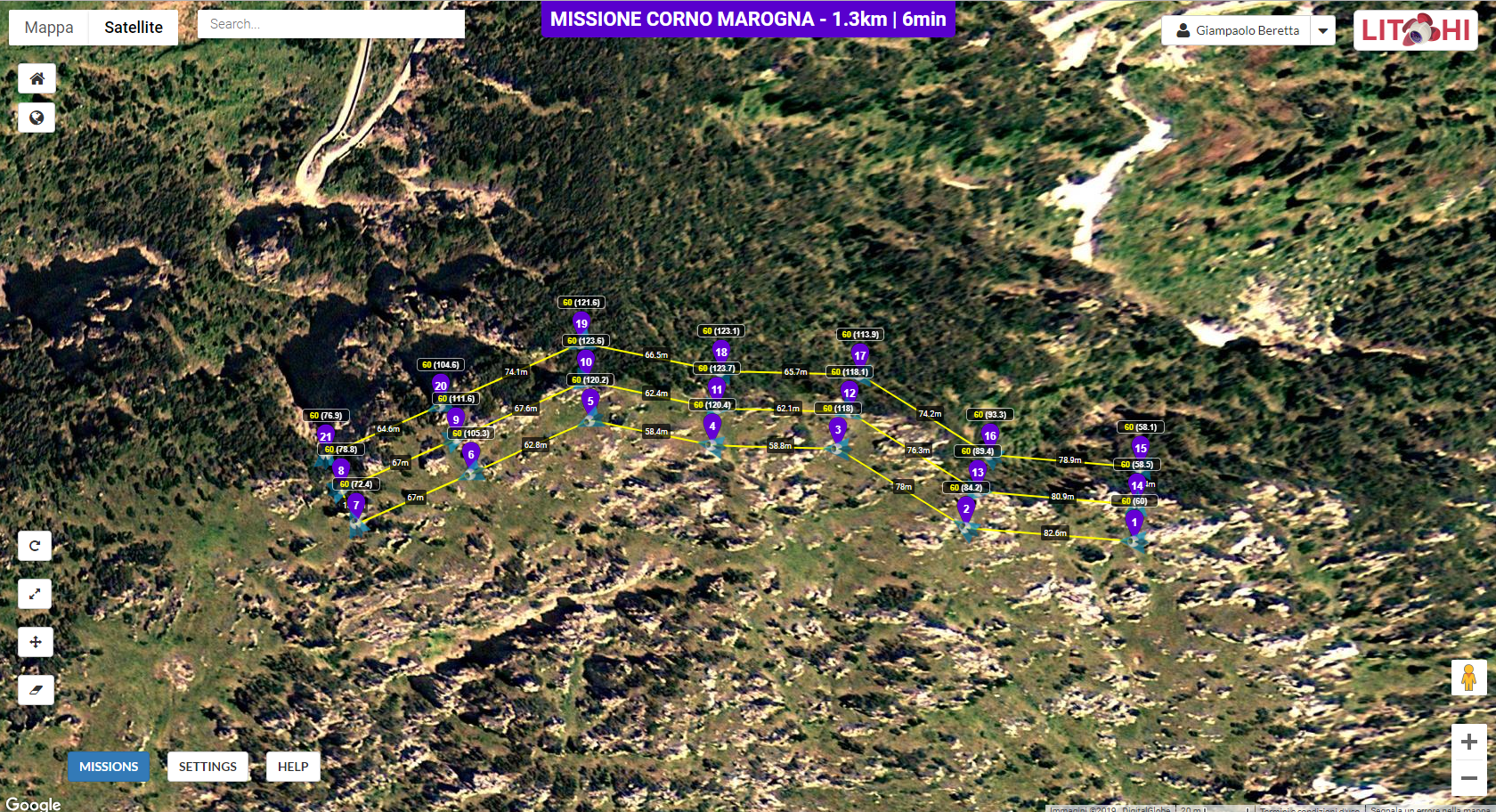
Una volta pianificata la missione, deducendo i parametri dal foglio Excel, ti mostro come realizzare la parte grafica per tracciare la rotta. Ne caso del punto 1 si può fare con QGIS (o Autocad come ho fatto io solo perché mi risulta più comodo), mentre nel caso del punto 2 si può utilizzare Land. La rotta poi verrà passata a Mission Hub per creare la missione automatica. Quando sarai in campo dovrai solo settare le impostazioni di scatto (intervallo, ISO, aperture, tempi, pitch, ecc.).
I procedimenti che ti mostro ti lasciano molta libertà di creazione delle missioni. Puoi anche inserire dei tratti al di fuori della classica serpentina, oppure creare più missioni, a livello grafico, da eseguire singolarmente con Litchi.
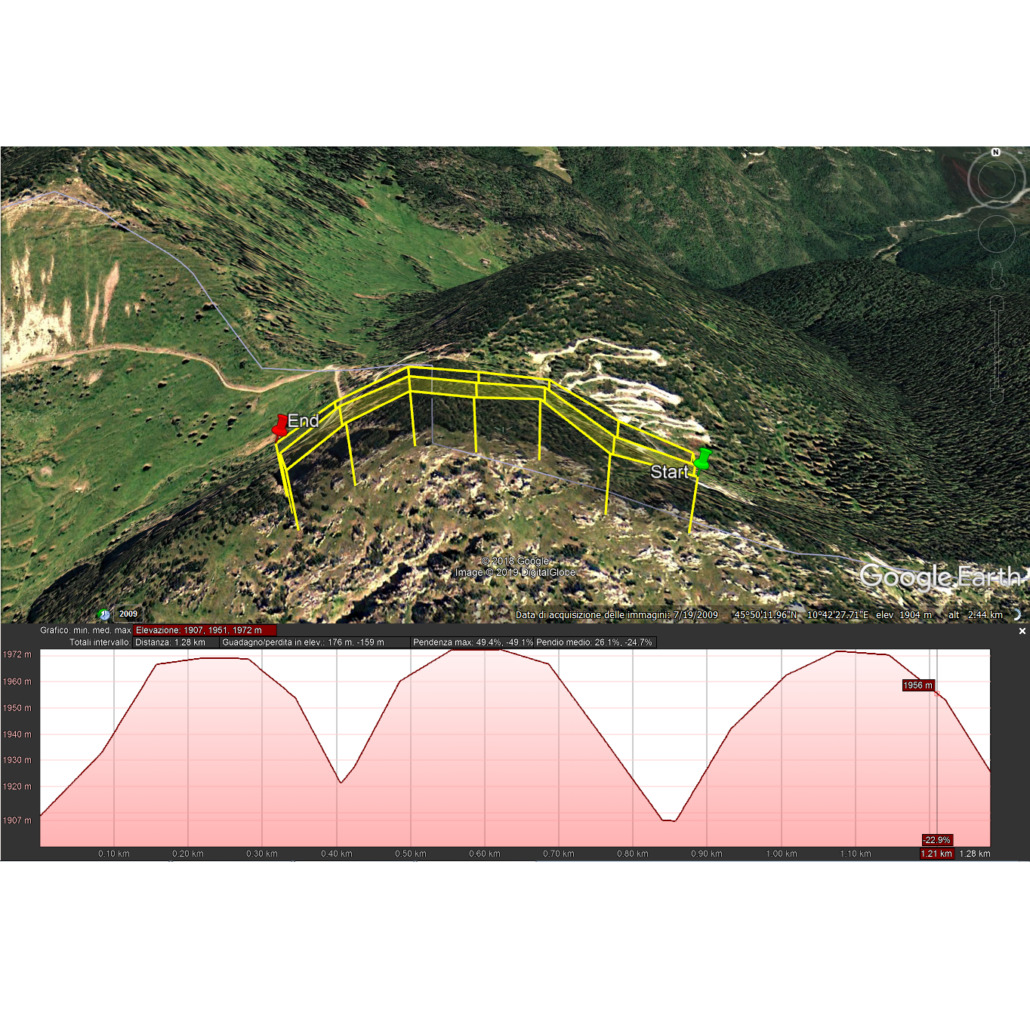
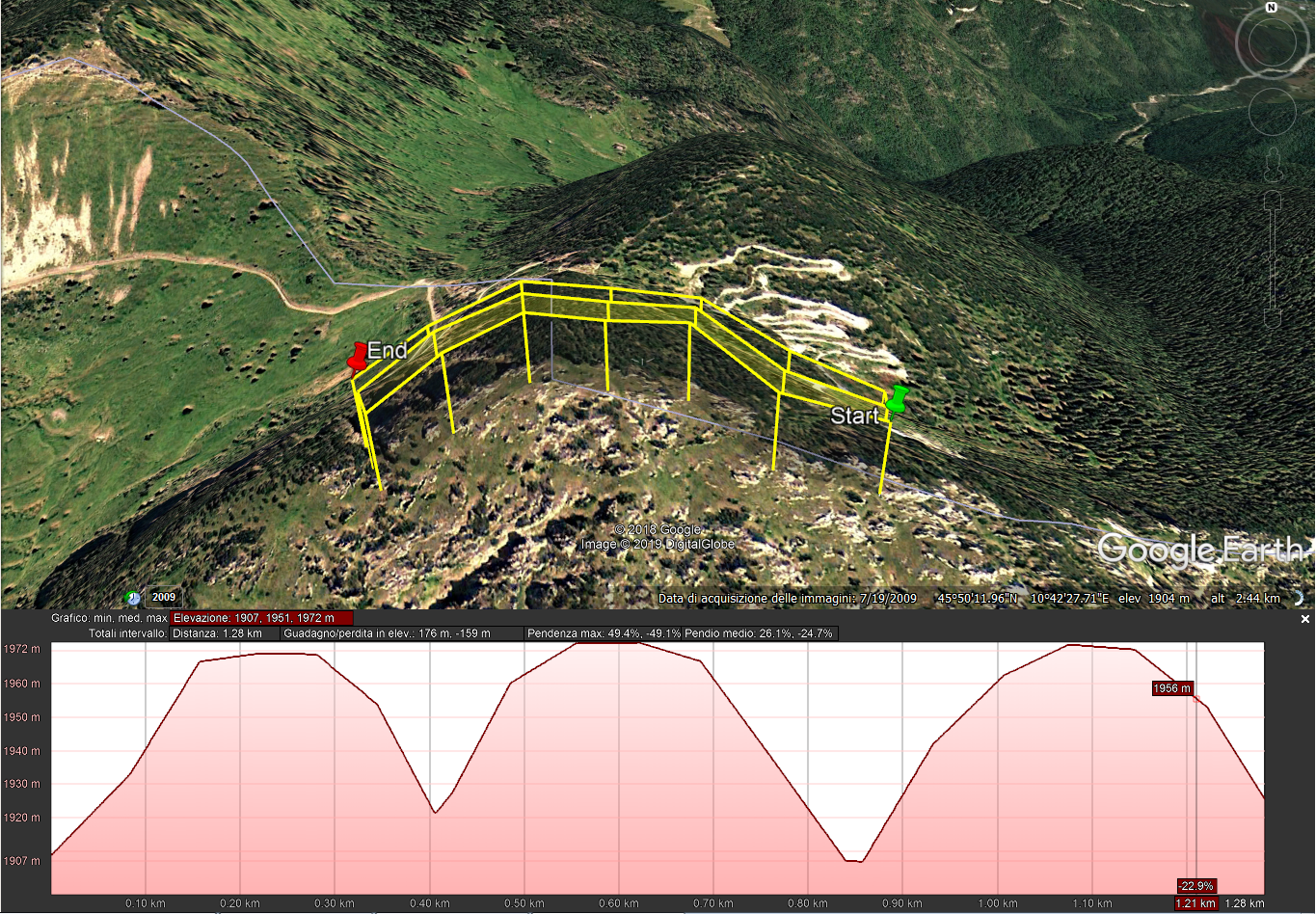
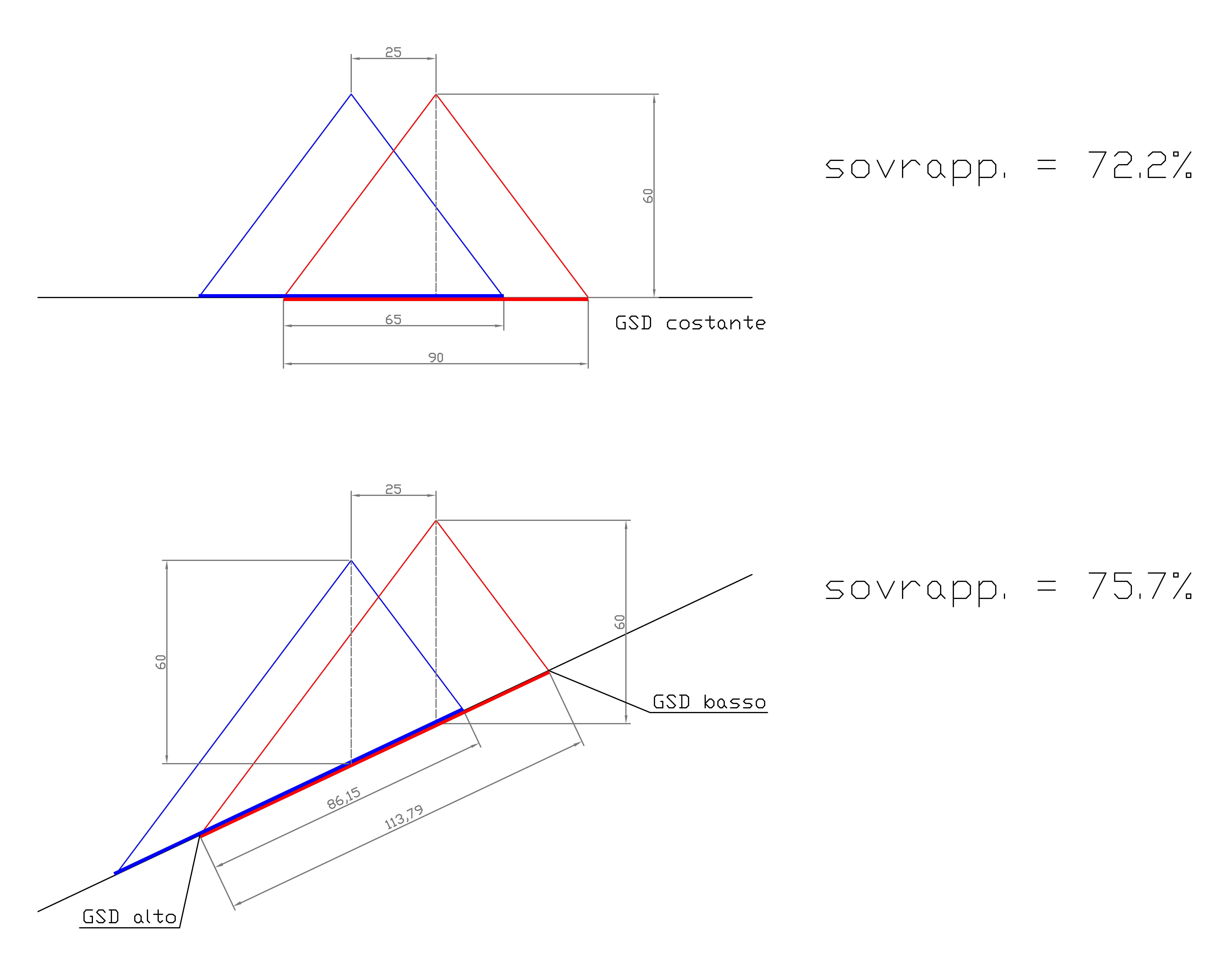
Gli esempi che ti mostro nei video contemplano la realizzazione di una missione nelle quali l’asse della camera è sempre posto in posizione nadirale, qualsiasi sia l’inclinazione del pendio sottostante. Questo provoca una variazione dei parametri impostati nel foglio Excel come, ad esempio la percentuale di sovrapposizione degli scatti. Inoltre, all’interno dei singoli scatti, il GSD sarà variabile. Nelle parti di terreno a quota maggiore si avrà un GSD inferiore (perché più vicine al drone), mentre nelle parti di terreno a quota inferiore si avrà un GSD maggiore (perché poste a maggior distanza dal drone. L’unico modo per avere un GSD costante, all’interno dei singoli scatti, sarebbe quello di inclinare la camera con l’asse ottico perpendicolare al versante. Lascio a te la scelta.
Ti lascio il link ad un articolo dove ti mostro come georeferenziare un’immagine con Autocad.
Ti ricordo che mi trovi anche su Telegram (https://t.me/giampaoloberetta) dove ho aperto un canale nel quale ti parlo della mia attività e condivido informazioni (https://t.me/inggiampaoloberetta).
Ora ti lascio alla visione dei due video.
Ciao!
1. PIANIFICAZIONE CON QGIS E MISSION HUB
2. PIANIFICAZIONE CON SIERRASOFT LAND E MISSION HUB








Lascia un Commento
Vuoi partecipare alla discussione?Sentitevi liberi di contribuire!