Ciao! Oggi voglio parlarti della check list pre-volo e post-volo che utilizzo io nella mia attività con i S.A.P.R. (Sistemi Aeromobili a Pilotaggio Remoto). La check list non è un documento richiesto dall’ENAC in fase di registrazione del proprio S.A.P.R. tuttavia riveste una grande importanza dal punto di vista operativo. Nel mondo aeronautico, ma anche nella vita di tutti i giorni, le check list sono molto diffuse. Si pensi, ed esempio, alla lista della spesa, oppure a quando si preparano le valige per un viaggio. L’organizzazione e l’esecuzione di determinate operazioni in una certa sequenza fa parte della nostra vita. Nel caso dei S.A.P.R. (vi prego, non formalizziamoci sui termini, lasciatemi scrivere “droni” perché sono stufo di premere shift e punto) l’utilizzo delle check list permette di eseguire i controlli prima e dopo il volo con la garanzia di non dimenticare nessuna di quelle operazioni che siamo abituati a compiere. Il problema è proprio questo: l’abitudine. Infatti, quando si è abituati a compiere una determinata azione, l’attenzione che gli si dedica è sempre di meno ed alla fine scatta l’errore: persone che si avvicinano, carica del tablet insufficiente, eliche fissate male (soprattutto se si utilizzano di quelle fissate con un dado), ecc. Gli effetti possono essere anche molto gravi sia per il drone, sia per le persone. La check list che trovate in allegato è stata elaborata sulla base di quanto contenuto nel manuale di volo del mio drone e nel fascicolo relativo all’analisi dei rischi redatta dall’operatore (io). A loro volta, questi due fascicoli derivano dalle risultanze dell’attività sperimentale condotta sul drone. Nel video che trovi in calce ti spiego ogni singolo punto della check list e faccio riferimento ai valori limite che non devono essere superati relativamente ad alcuni parametri. Questo elenco non è esaustivo e non è l’unico possibile; è solo quello che utilizzo io. Ho messo solo le cose che temo di dimenticare. Altre cose non le ho elencate perché, a mio avviso, fanno parte del normale utilizzo del drone e non mi sono sentito di inserirle. Ad esempio, indossare il corpetto ad alta visibilità con la scritta “Pilota di APR” (fa comunque parte delle misure preventive inserite nell’analisi dei rischi), oppure non lasciare la borsa di trasporto del drone vicino al punto home, ma depositarla ad almeno 4 m di distanza (durante il return to home è meglio dedicarsi ad osservare il drone piuttosto che mettersi a spostare la borsa in tutta fretta per non atterrarci sopra). Sono tutte cose che ho messo nell’analisi dei rischi, ma non nella check list.
Bene! Qui sotto trovi la check list in formato Word. Non prenderla come oro colato; è solo quella che utilizzo io. Ti metto anche il video che ho caricato su YouTube. Di seguito metto anche alcuni link che potrebbero interessarti relativamente all’indice kp del quale ti parlo nel video.
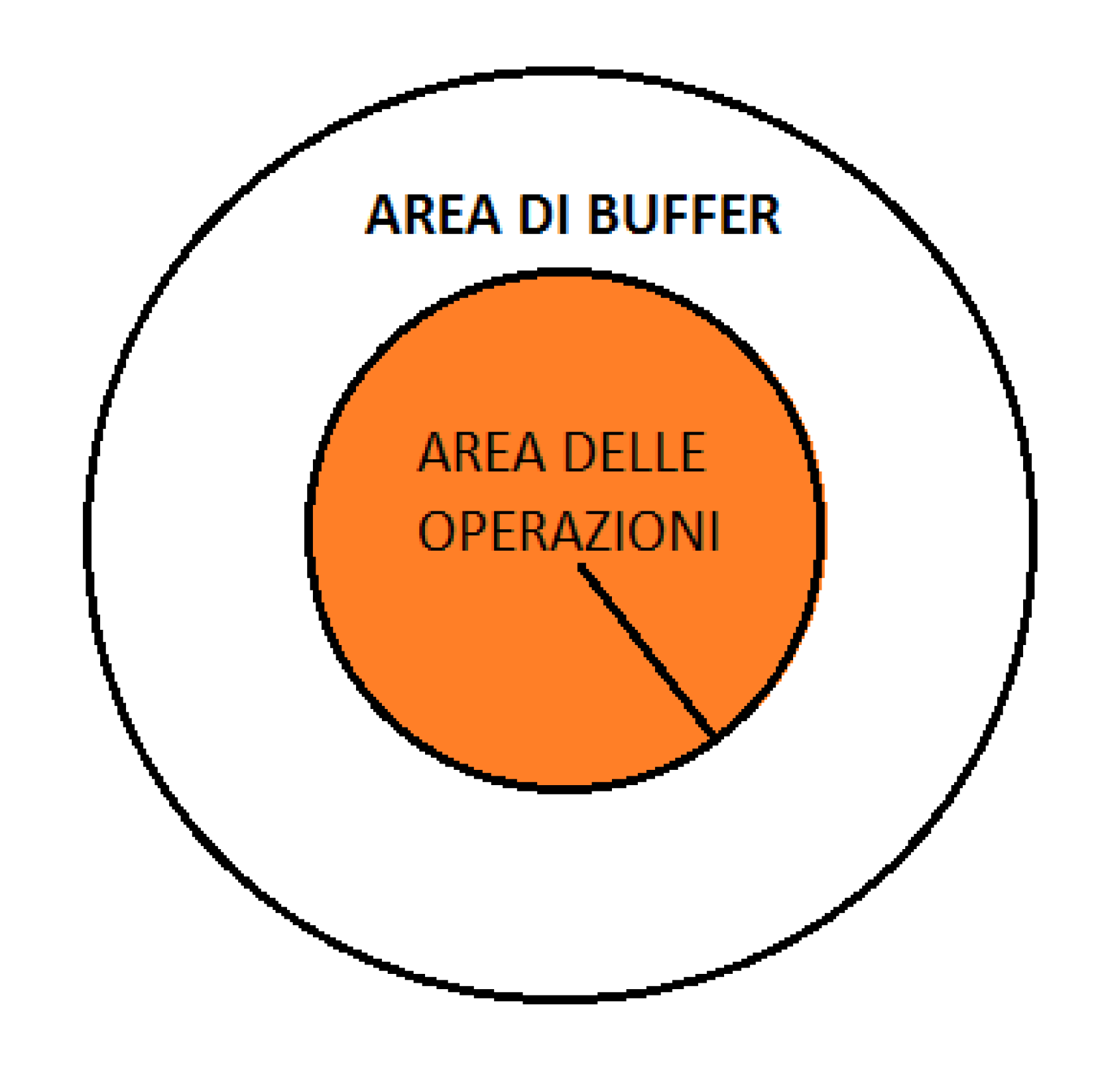
Ciao! In questo articolo ti voglio mostrare come calcolare l’area di buffer in funzione della velocità del vento. L’area di buffer puoi immaginarla come una zona posta tutt’attorno all’area delle operazioni nella quale il volo può essere terminato in condizioni di sicurezza.
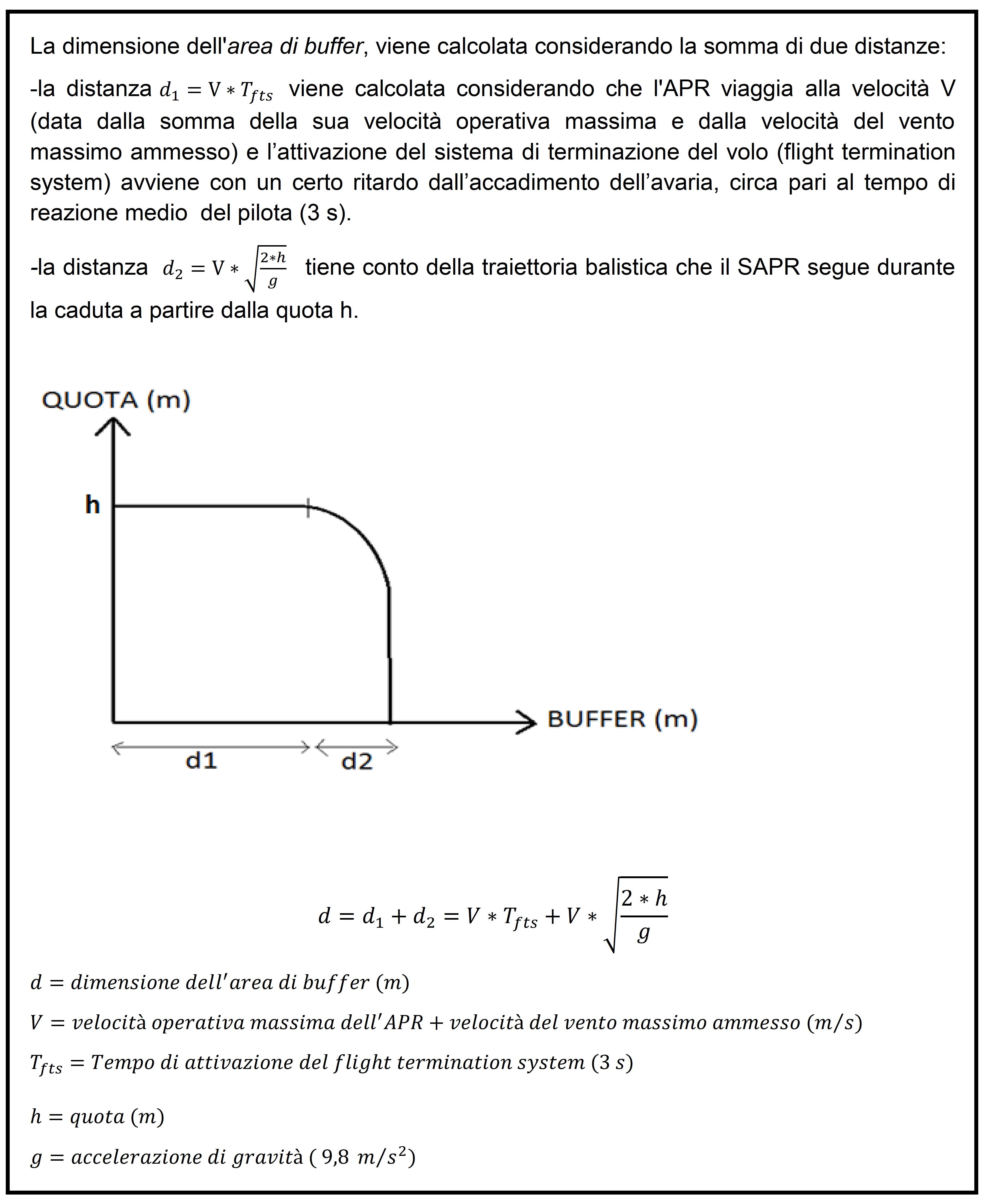
Il documento dà degli spunti interessanti e rappresenta sicuramente un valido riferimento, tuttavia credo che meriti degli approfondimenti soprattutto in relazione all’influenza della velocità del vento sulla dimensione dell’area di buffer. La dimensione del buffer viene determinata come somma di due distanze:
La distanza percorsa dal drone a velocità costante tra il momento in cui si perde il controllo ed il momento in cui si attiva il sistema di terminazione del volo. Tale intervallo va assunto pari ad almeno 3 s.
La distanza percorsa dal drone durante la fase di caduta dall’altezza a cui volava fino a terra.
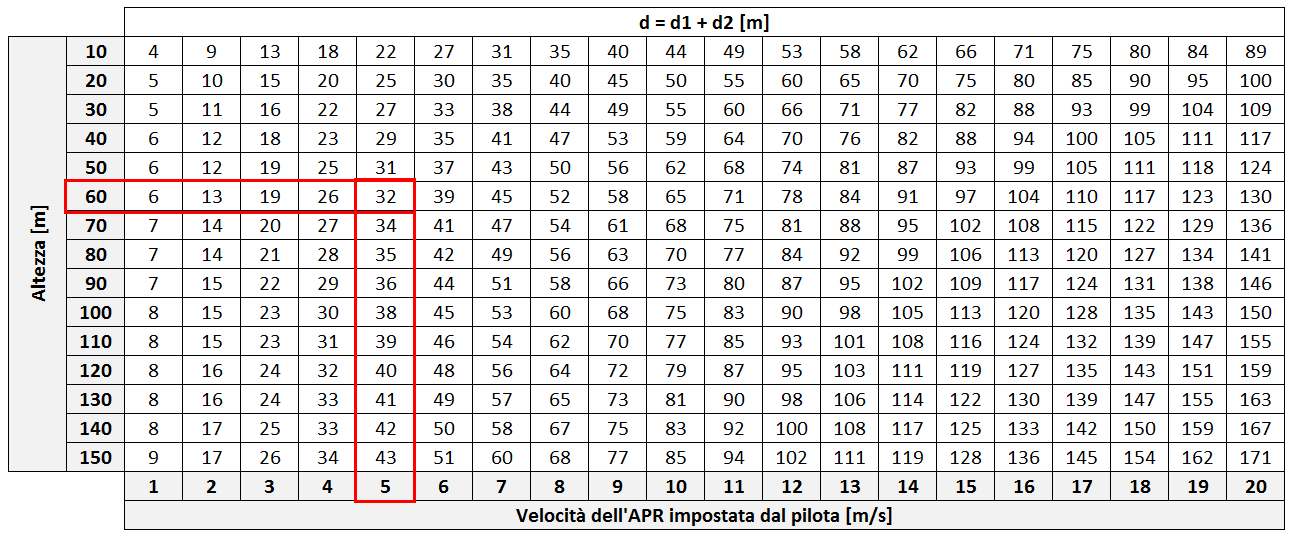
I due termini sopra dipendono dalla velocità orizzontale dell’APR che viene indicata come essere pari alla somma tra la velocità operativa massima dello stesso e la velocità del vento massimo ammesso. Andiamo per gradi. Immaginiamo, per ora, che non ci sia vento. La velocità da considerare sarebbe solo quella del drone. La formula sopra, per varie velocità ed altezze dal suolo, condurrebbe ai valori riportati nella seguente tabella.
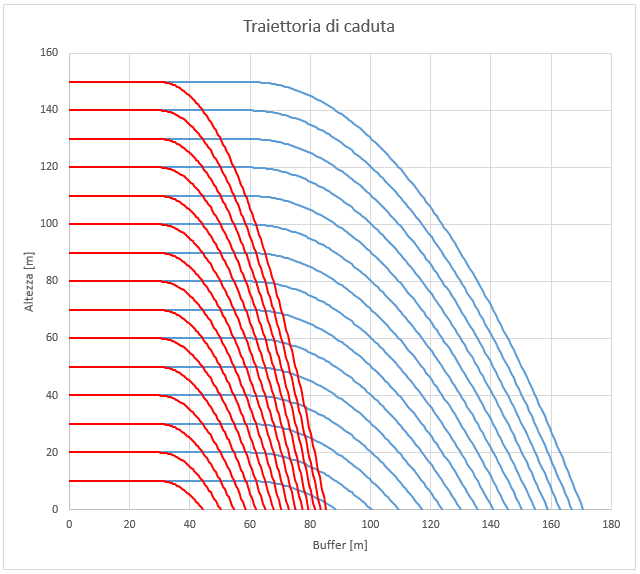
Se l’APR vola a 60 m di altezza ad una velocità di 5 m/s, il buffer deve essere ampio almeno 32 m. Puoi trovare la tabella nel file Excel allegato. Per una velocità dell’APR di 20 m/s (che è quella massima di un DJI Phantom 4 Pro), la traiettoria di caduta da varie altezze sarebbe quella indicata in blu nell’immagine seguente, mentre quella in rosso è per una velocità di 10 m/s.
Facciamo ora un passo avanti. Cominciamo a considerare la velocità del vento.
Innanzi tutto la velocità del vento da considerare è quella relativa all’altezza di volo che, immagino, non sia nota al momento della perdita di controllo del drone. Il pilota più accorto, semmai, avrà misurato la velocità del vento prima di far decollare l’aeromobile ed avrà effettuato una misura ad altezza d’uomo (o donna…). In secondo luogo, non è sempre corretto considerare l’intero valore della velocità del vento. I multirotori, nella maggior parte dei casi, non sono aerodinamici e non vengono scarrocciati dal vento in coda tanto da poter mantenere la medesima velocità della corrente che li sospinge. Semmai solo una quota della velocità del vento si “trasferirà” all’APR. Nel caso di droni ad ala fissa, invece, il vento in coda li scarroccia per bene ed allora è corretto considerare l’intera intensità del vento, o quasi. Si pongono, quindi, tre problemi:
Come conoscere la velocità del vento al momento della perdita di controllo dell’APR?
Come calcolare la velocità del vento in quota avendo nota quella a terra?
Quanto influisce la velocità del vento su quella di un multirotore?
Per quanto riguarda il primo punto, il pilota intento a controllare il volo non credo possa permettersi di continuare a metter mano all’anemometro per controllare la velocità del vento. E’ auspicabile che lo abbia fatto prima di decollare, soprattutto se sta operando secondo gli scenari standard nei quali la velocità massima del vento è un pre-requisito da rispettare. Durante il volo, tuttavia, il pilota può tenere sotto controllo l’intensità del vento semplicemente confrontandola “a pelle” e “a vista” con quella misurata inizialmente. Raffiche che inizialmente non c’erano, aumento del vento rispetto al momento della misura, il movimento delle chiome degli alberi che aumenta. Secondo me, dopo un po’ che piloti, sono cose che osservi istintivamente e capisci se puoi proseguire il volo in sicurezza. Se senti o se vedi che il vento è aumentato rispetto al momento della misura, sai che il buffer dovrà essere più ampio rispetto a quanto avevi calcolato inizialmente.
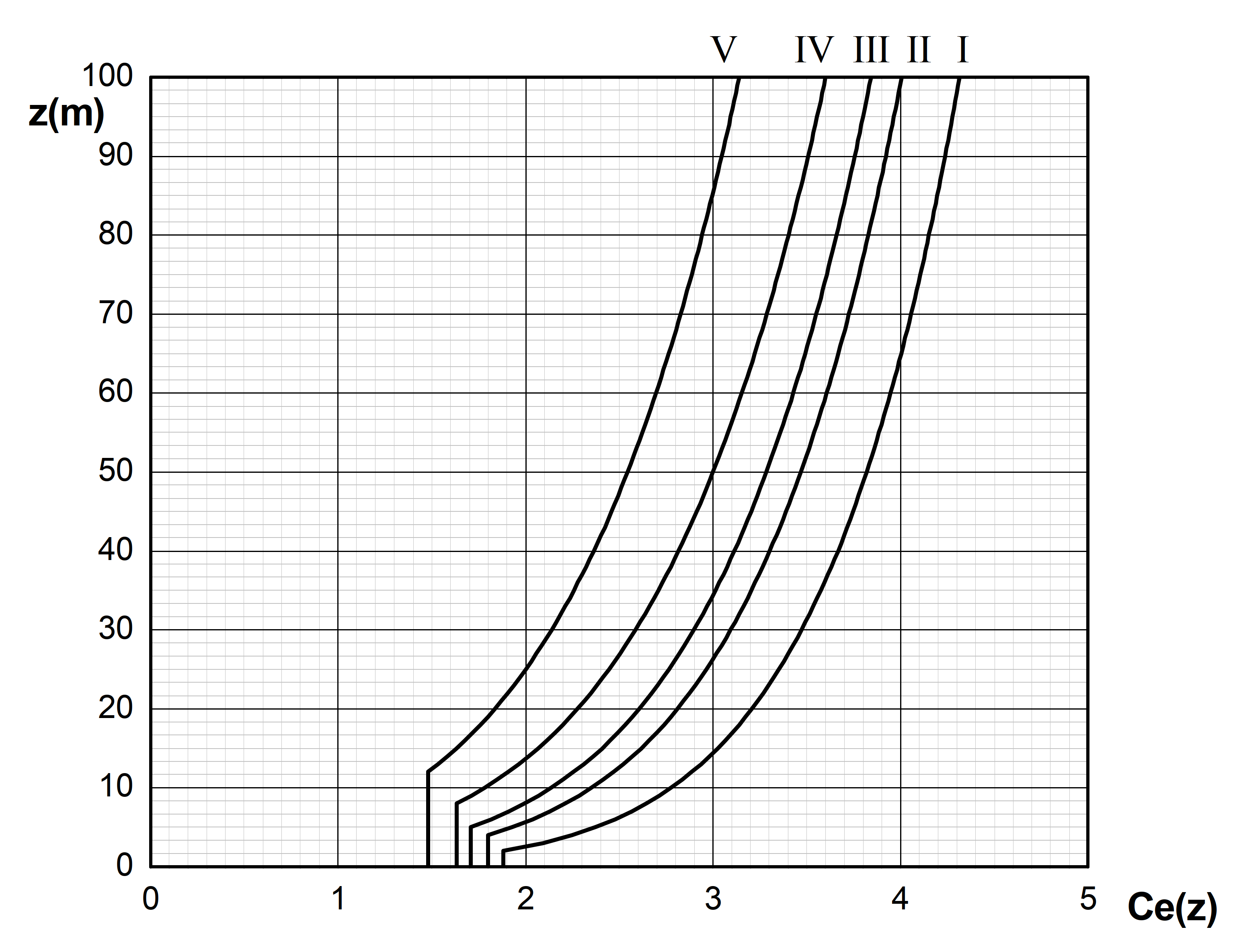
Veniamo al secondo punto. La velocità del vento a terra è minore di quella in quota. Chiaramente la corrente d’aria che sfiora il suolo viene rallentata e lo fa in modo sempre più marcato man mano che aumenta la scabrezza della superficie. Nella aree urbane il vento ha una velocità inferiore rispetto a quella che ha nelle aree prive di ostacoli. Inoltre, a quote più alte la scabrezza perde il suo effetto e la corrente aumenta di velocità. Il tutto viene efficacemente rappresentato da un coefficiente detto di “esposizione”. Ne esistono diverse formulazioni. Quella che vi mostro è tratta dalle Norme Tecniche sulle Costruzioni. Nel grafico che segue si vede come il coefficiente di esposizione “Ce” aumenta man mano che aumenta l’altezza dal suolo “z” e come la “categoria di esposizione I” (lungo le coste e sul mare) sia quella che presenta valori maggiori di tale coefficiente.
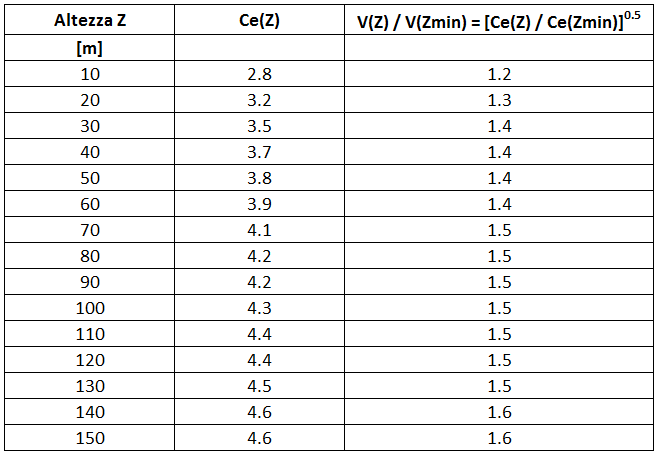
Non voglio entrare nei dettagli delle formule, tuttavia vi posso dire che, col fine di determinare l’influenza della velocità del vento sull’area di buffer, considererò la categoria di esposizione I la quale fornisce dei valori cautelativi. Al termine di questo articolo metterò a disposizione un foglio Excel per fare i calcoli secondo diverse categorie di esposizione. Dal diagramma sopra si vede che le curve presentano un tratto verticale fino ad altezze dal suolo comprese tra 2 m e 12 m (dette “Zmin”), a seconda della categoria di esposizione. Noi piloti, con l’anemometro portatile, misuriamo la velocità del vento proprio all’interno di quel tratto, a 2 m da terra, ad esempio. Se siete in un campo volo probabilmente avete a disposizione la velocità del vento a 10 m da terra. La tabella seguente mostra la relazione tra le velocità del vento misurata al suolo e quella a varie altezze.
Ora vi dico cosa ho fatto. Considerate, ad esempio, un’altezza Z=50 m. Per la categoria d’esposizione I si ha Ce(Z)=Ce(50)=3.8 (guarda il grafico di prima). Le Norme Tecniche sulle Costruzioni mi dicono che Zmin vale 2 m, quindi posso calcolare Ce(Zmin)=Ce(2)=1.9 (guarda ancora il grafico di prima nella parte rettilinea). Il rapporto tra la velocità del vento in quota e quella a terra è proporzionale alla radice quadrata del rapporto tra i corrispondenti coefficienti d’esposizione. I relativi valori sono riportati nella terza colonna. Ed ora? Cosa me ne faccio? Semplicemente posso prendere tale rapporto e moltiplicarlo per la velocità del vento misurata a terra per ottenere la velocità del vento in quota. E tiriamo una riga anche sul secondo punto.
Veniamo al terzo punto. Quando la corrente d’aria, a velocità costante, investe l’APR si genera su di esso una pressione che lo sospinge e gli imprime un’accelerazione, pertanto la velocità che acquisisce non rimane costante, ma aumenta. Se inizialmente era fermo, comincerà a muoversi, accelerando. La tendenza sarà quella di assumere le velocità del vento, ma non ci arriverà mai a causa dell’attrito con l’aria. Ho fatto una prova col mio DJI Phantom 4 Pro lasciandolo in hovering in P-mode (Positioning) col vento più o meno costante (tenevo d’occhio un anemometro fissato ad un’asta); poi ho cambiato la modalità di volo in A-mode (Attitude) e l’APR ha cominciato a spostarsi lungo la direzione del vento. Nel frattempo cronometravo quanto ci impiegava a compiere una certa distanza (avevo steso a terra una cordella metrica). La velocità media per compiere lo stesso tratto è data dal rapporto tra lo spazio percorso ed il tempo impiegato. Tale velocità media è una percentuale di quella del vento. Ripetendo la prova più volte ho estratto un valore medio di tale percentuale. E’ un metodo poco rigoroso, lo so, ma almeno è supportato da prove sul campo.
Da queste considerazioni emerge che assumere la velocità del multirotore pari a quella del vento è fin troppo cautelativo, ma d’altro canto non si può nemmeno dire che il vento non cambi la velocità dell’APR. Va considerato anche che, quando l’APR va fuori controllo, non è detto che il vento soffi proprio nella direzione più sfavorevole. Magari tende a spingerlo all’interno della zona delle operazioni anziché allontanarlo.
In base alle considerazioni sopra, mi sentirei abbastanza confidente nel ritenere che il vento aumenti la velocità dell’APR di una percentuale pari al 20% della velocità del vento. Non prendete questa percentuale come oro colato. Ognuno faccia le prove col suo drone e nelle condizioni che ritiene più adeguate.
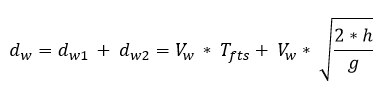
A questo punto è possibile calcolare l’incremento dell’area di buffer per effetto del vento (dw).
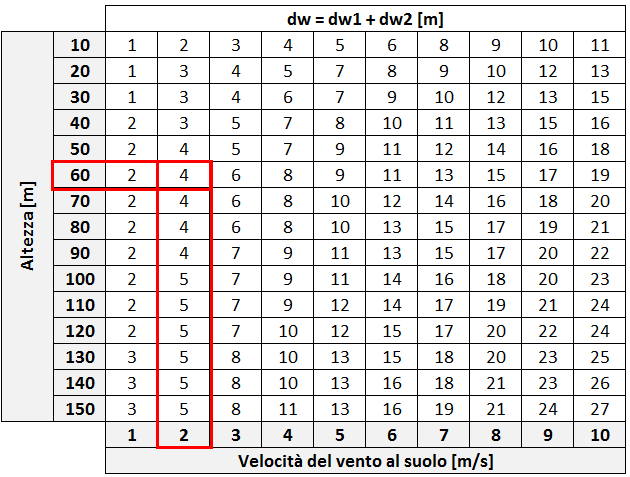
dove Vw è l’incremento di velocità dell’APR per effetto del vento. Tale incremento lo assumo pari al 20% del vento in quota. Il vento in quota è a sua volta pari al vento a terra moltiplicato per il coefficiente amplificativo riportato nella tabella sopra. Non preoccupatevi, a fare i calcoli ci pensa il foglio Excel allegato. La tabella seguente mostra i risultati. Se il drone vola a 60 m di altezza ed il vento al suolo soffia a 2 m/s, allora la distanza di buffer va aumentata di 4 m.
A questo punto il gioco è fatto. L’area di buffer che tiene conto sia della velocità dell’APR al momento della perdita di controllo, sia del vento è data da:
D = d + dw
Facciamo un esempio riepilogativo. Supponiamo di volare a 60 m di altezza e ad una velocità di 5 m/s (ad esempio durante una missione di volo automatico). Dalla prima tabella ricavo che l’area di buffer deve essere ampia almeno 32 m. Se il vento misurato a terra ha una velocità di 2 m/s, volando a 60 m di altezza dovrà aumentare il buffer di 4 m (vedi la tabella sopra). L’area di buffer dovrà essere ampia almeno D=32+4=36 m.
Spero di essere stato chiaro. Semmai non esitate a contattarmi. Ti ricordo che mi trovi anche su Telegram (https://t.me/giampaoloberetta) dove ho aperto un canale nel quale ti parlo della mia attività e condivido informazioni (https://t.me/inggiampaoloberetta).
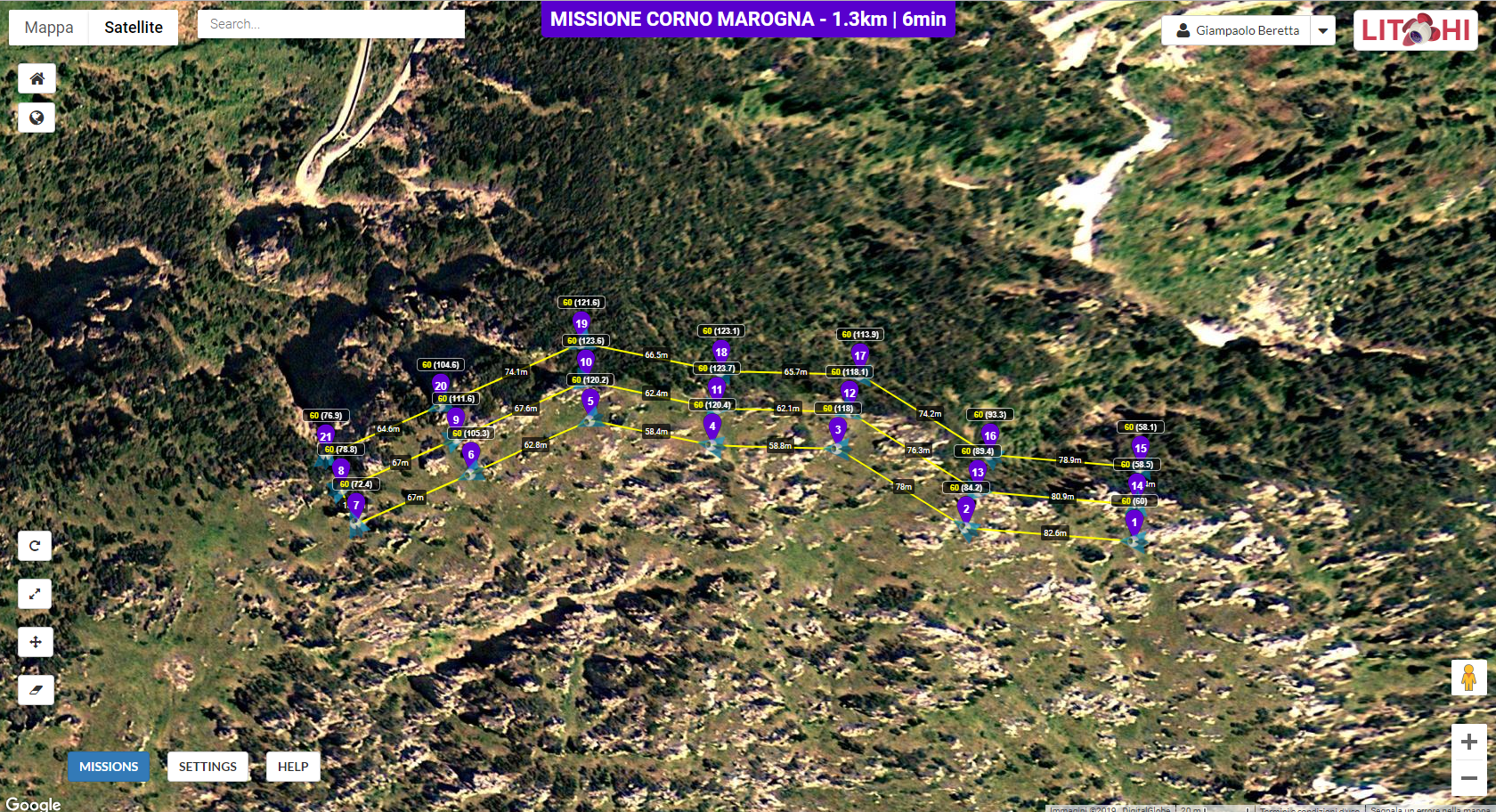
Ciao! In questo articolo e nei video allegati ti mostro come puoi pianificare una missione di volo di un drone facendolo volare ad altezza costante rispetto al terreno, ma a quota variabile. Per farlo ti proporrò due strade diverse che contemplano l’uso di due combinazioni diverse di software:
Il software open source QGIS e l’applicativo web Mission Hub di Litchi. La soluzione è a basso costo, ma i risultati ottenibili, a mio avviso, sono davvero interessanti.
Il software Sierrasoft Land ed ancora l’applicativo web Mission Hub di Litchi. In questo caso, a mio avviso, si ottengono dei risultati più attendibili e la procedura è più veloce.
Per pianificare la missione ti metto a disposizione un foglio Excel realizzato da me nel quale trovi inseriti i dati relativi alla fotocamera del DJI Phantom 4 Pro, ma funziona anche per altre fotocamere. Basta inserire i dati corretti. Il foglio Excel pone come dato di partenza il GSD (Ground Sample Distance) ed in base ai parametri che imposterai calcolerà l’altezza di volo massima del drone. La velocità massima in avanzamento e la distanza trasversale tra le strisciate dipendono, invece, dall’intervallo tra gli scatti e dalla percentuale di sovrapposizione tra essi. Non ti spiego la teoria che sta alla base dei calcoli. Puoi trovare le spiegazioni che ti servono in articoli facilmente reperibili su internet. In fondo alla pagina ti lascio i riferimenti del sito di 3DMetrica dove potrai trovare tutto quello che ti serve. Una volta pianificata la missione, deducendo i parametri dal foglio Excel, ti mostro come realizzare la parte grafica per tracciare la rotta. Ne caso del punto 1 si può fare con QGIS (o Autocad come ho fatto io solo perché mi risulta più comodo), mentre nel caso del punto 2 si può utilizzare Land. La rotta poi verrà passata a Mission Hub per creare la missione automatica. Quando sarai in campo dovrai solo settare le impostazioni di scatto (intervallo, ISO, aperture, tempi, pitch, ecc.). I procedimenti che ti mostro ti lasciano molta libertà di creazione delle missioni. Puoi anche inserire dei tratti al di fuori della classica serpentina, oppure creare più missioni, a livello grafico, da eseguire singolarmente con Litchi.
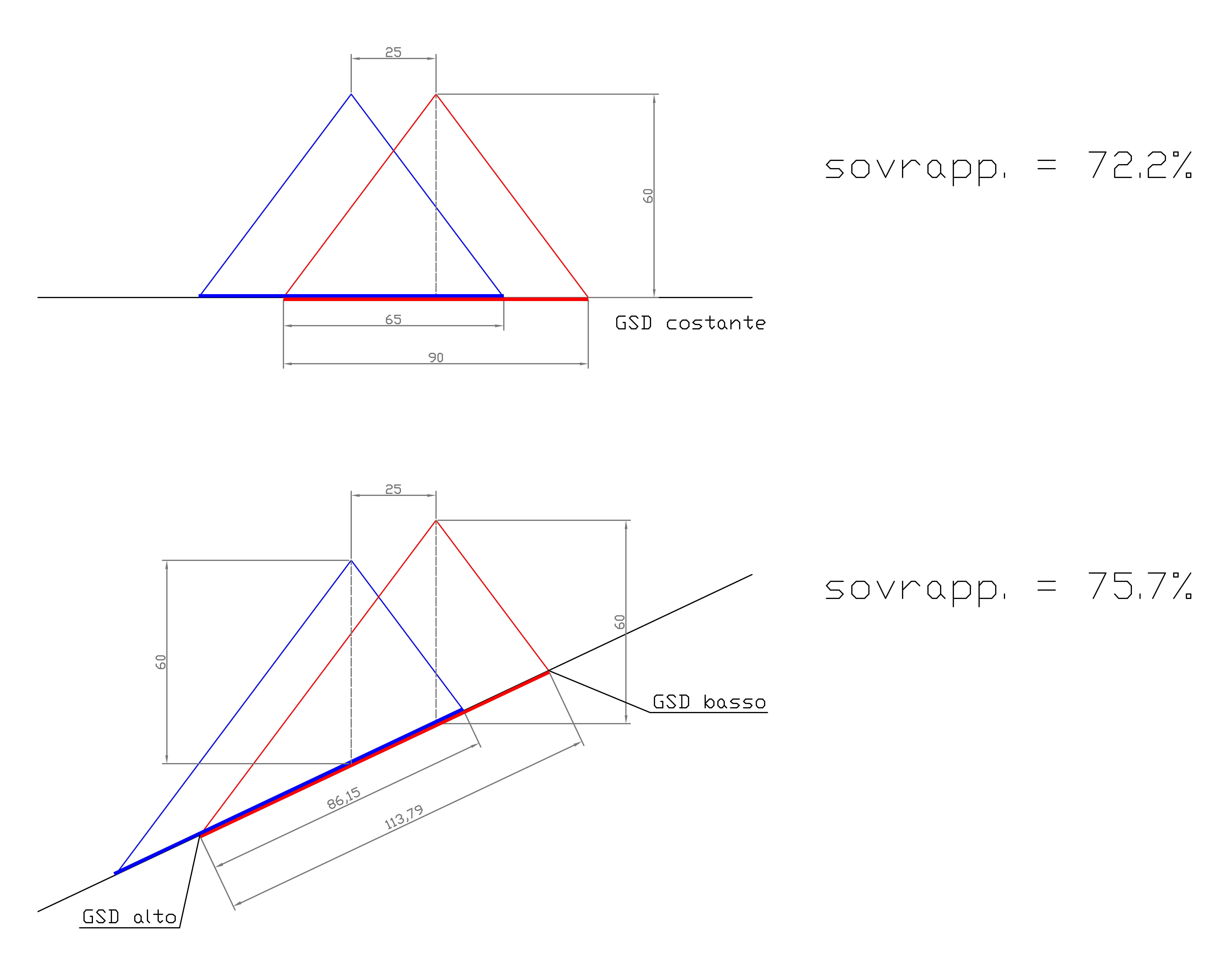
Gli esempi che ti mostro nei video contemplano la realizzazione di una missione nelle quali l’asse della camera è sempre posto in posizione nadirale, qualsiasi sia l’inclinazione del pendio sottostante. Questo provoca una variazione dei parametri impostati nel foglio Excel come, ad esempio la percentuale di sovrapposizione degli scatti. Inoltre, all’interno dei singoli scatti, il GSD sarà variabile. Nelle parti di terreno a quota maggiore si avrà un GSD inferiore (perché più vicine al drone), mentre nelle parti di terreno a quota inferiore si avrà un GSD maggiore (perché poste a maggior distanza dal drone. L’unico modo per avere un GSD costante, all’interno dei singoli scatti, sarebbe quello di inclinare la camera con l’asse ottico perpendicolare al versante. Lascio a te la scelta.
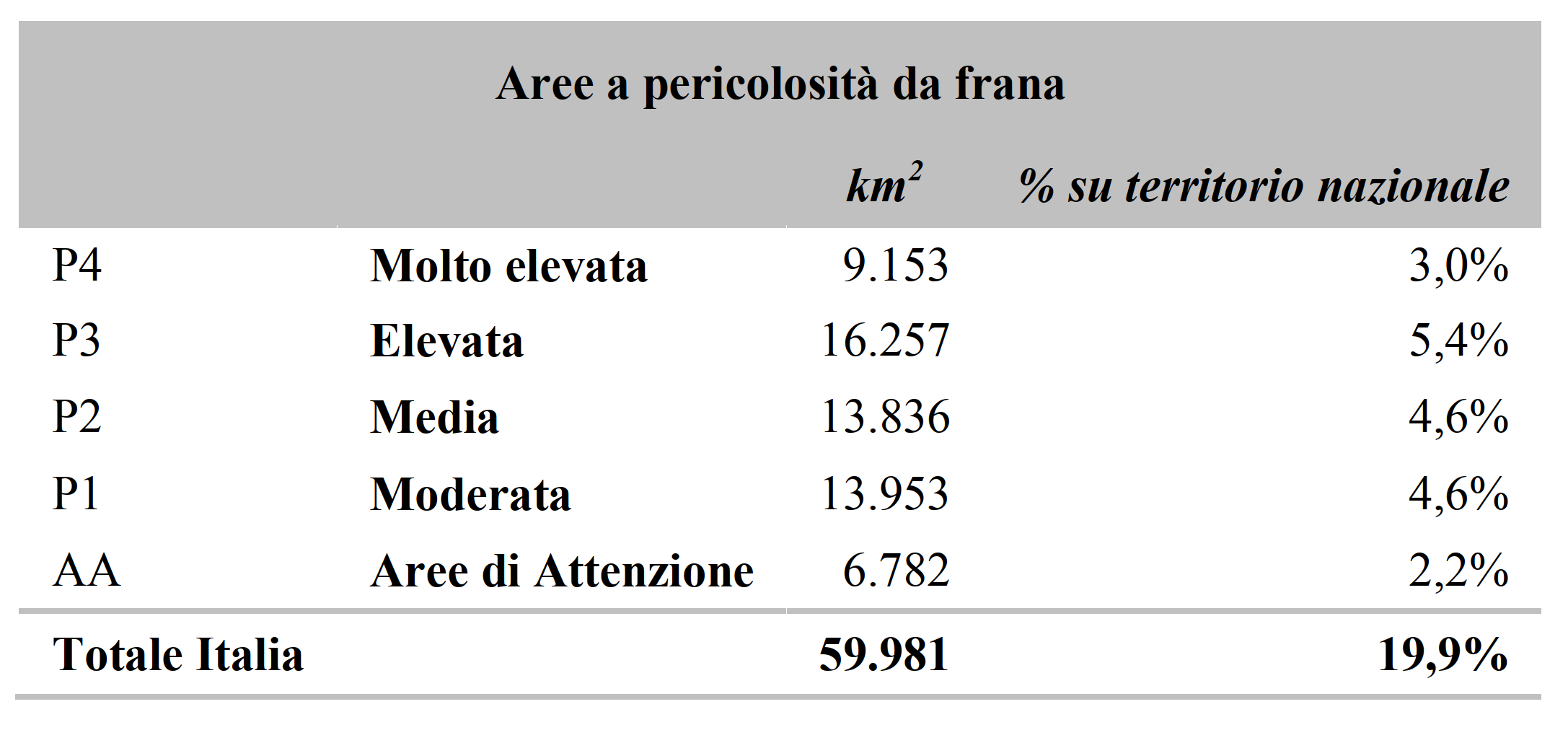
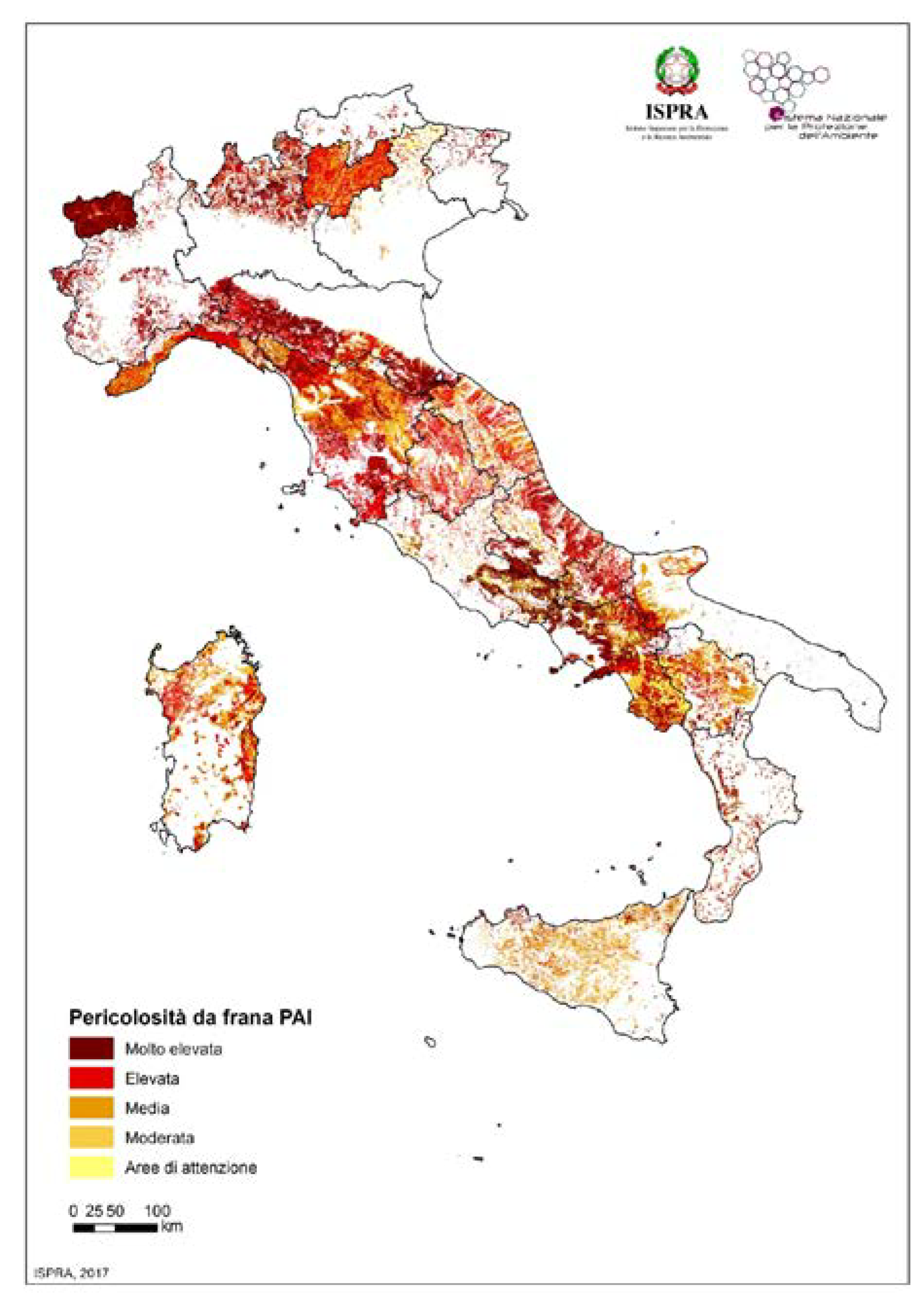
Il rapporto sul dissesto idrogeologico in Italia, elaborato dall’Istituto Superiore per la Protezione e la Ricerca Ambientale (ISPRA), riporta un quadro aggiornato sulla pericolosità per frane e alluvioni nel territorio nazionale. I dati mettono in evidenza che il 19.9% della superficie nazionale è a rischio frane e ben l’8.4% con pericolosità molto elevata o elevata.
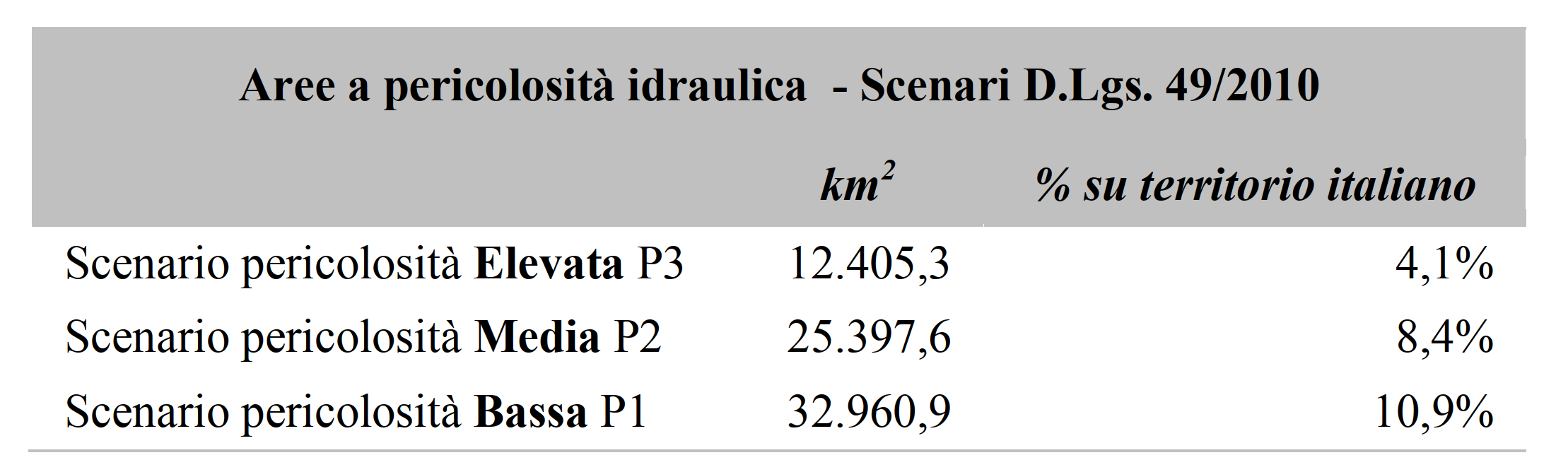
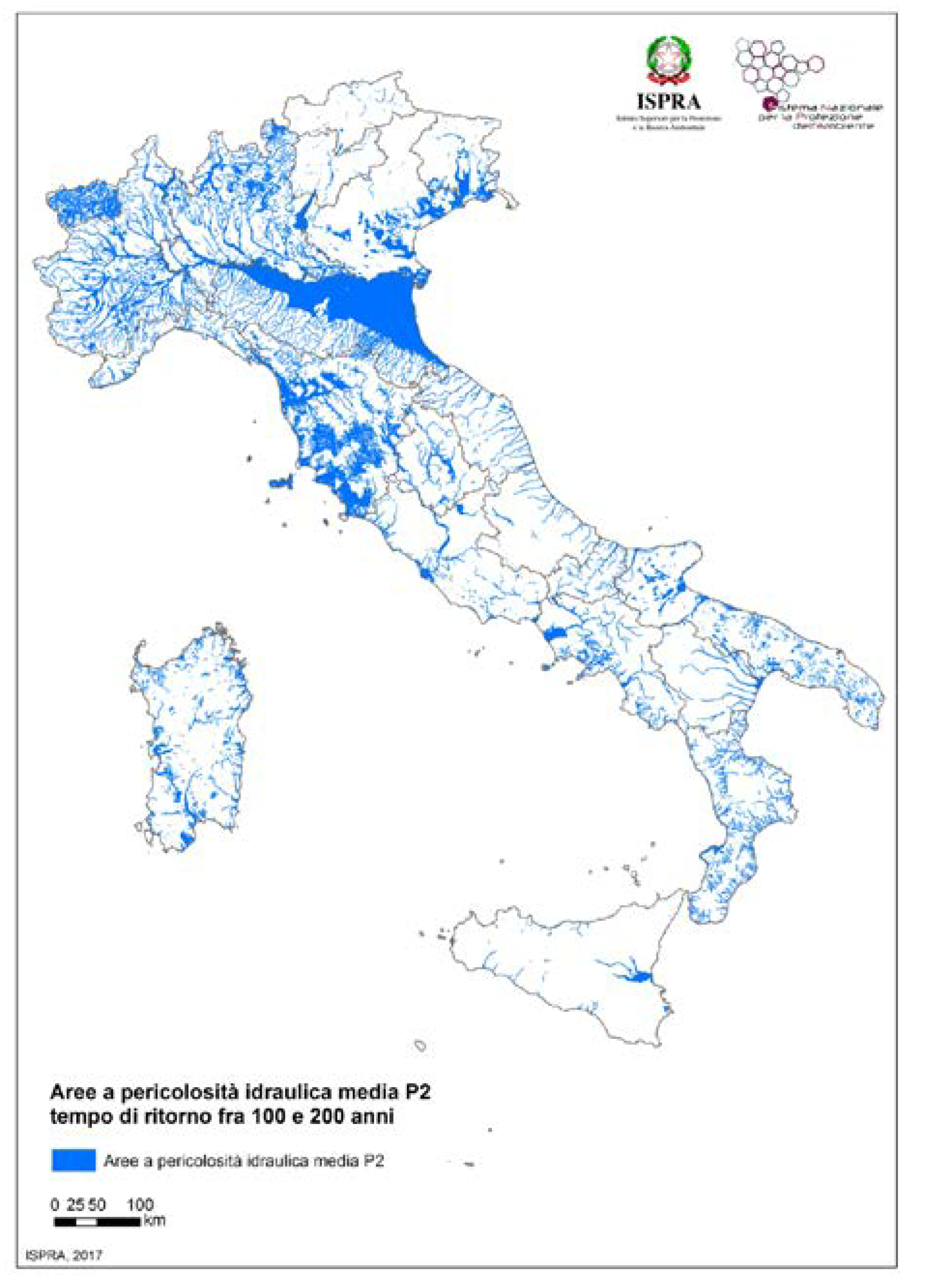
Alle aree a rischio frana vanno aggiunte quelle a rischio alluvione che hanno una superficie del 23.4% di quella nazionale.
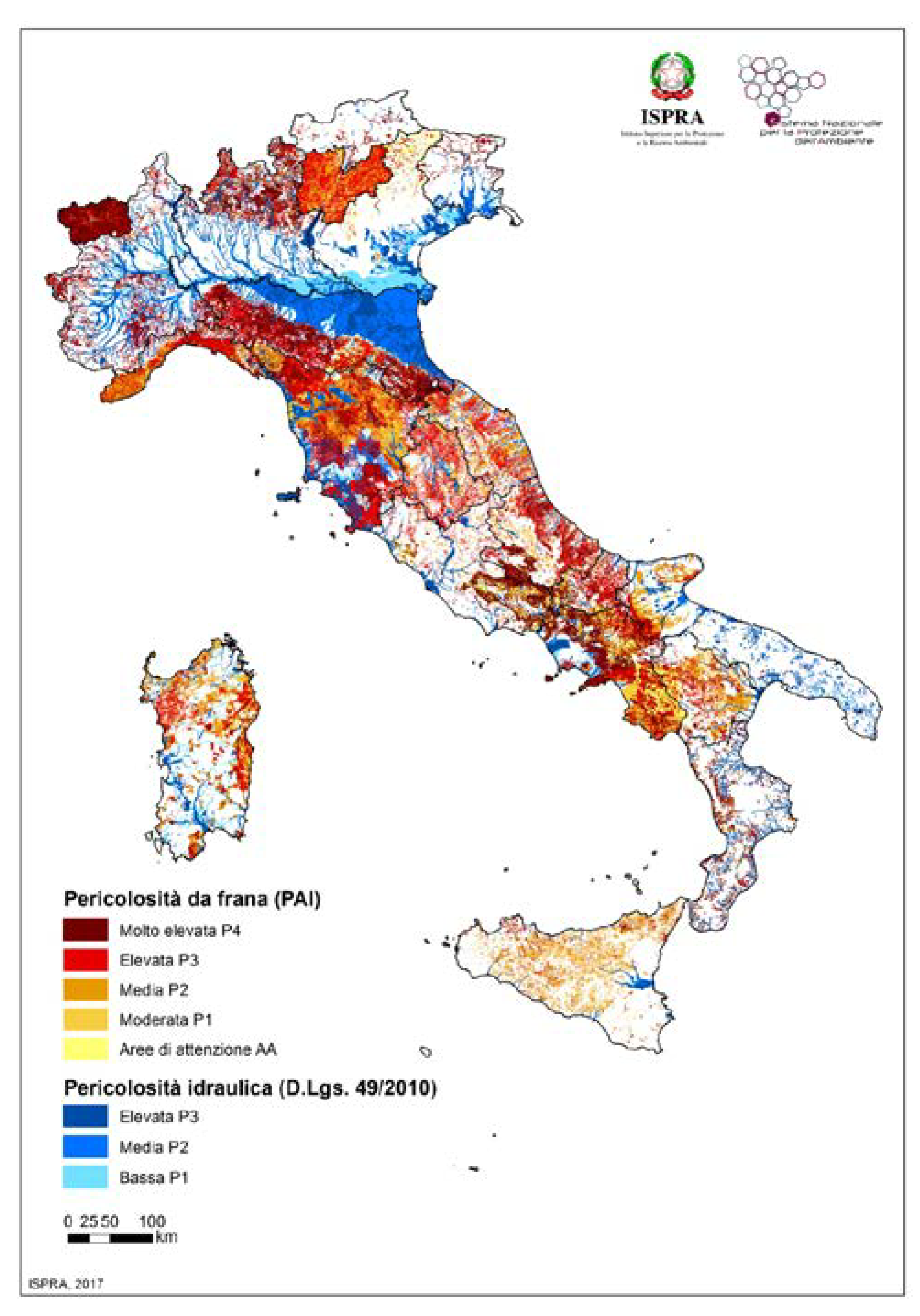
Mettendo assieme frane e alluvioni si ottiene la mappa seguente:
La superficie delle aree classificate a pericolosità da frana elevata o molto elevata e/o idraulica media ammonta complessivamente al 16,6% del territorio nazionale. Impressionante!
Un quadro generale come quello mostrato dal Rapporto ISPRA pone in evidenza come debbano essere messe in campo delle strategie di prevenzione e difesa efficaci. In questo ambito ritengo che i droni possano davvero offrire un valido aiuto. Si pensi, ad esempio, alla possibilità di effettuare dei sorvoli su zone pericolose dove è appena avvenuta una frana o si sospetta possa avvenire. Oppure affidarsi ai droni per controllare l’efficacia e lo stato di degrado di opere di consolidamento già realizzate. Spesso si tratta di zone la cui accessibilità è limitata a causa dell’elevata pendenza, della mancanza di strade o semplicemente perché le opere a verde realizzate stanno facendo bene il loro lavoro crescendo e moltiplicandosi. Uno sguardo dall’alto può sicuramente dare una mano. Il periodo migliore per i sopralluoghi, almeno qui dalle mie parti, in Trentino, è l’inizio della primavera. Gli alberi non hanno ancora le nuove foglie e durante l’inverno si sono completamente spogliati di quelle vecchie grazie alla neve ed al vento. Il suolo è libero dalla neve e le opere di difesa si vedono bene. Inoltre si possono vedere eventuali danni provocati da valanghe recenti o dai torrenti creati dal disgelo.
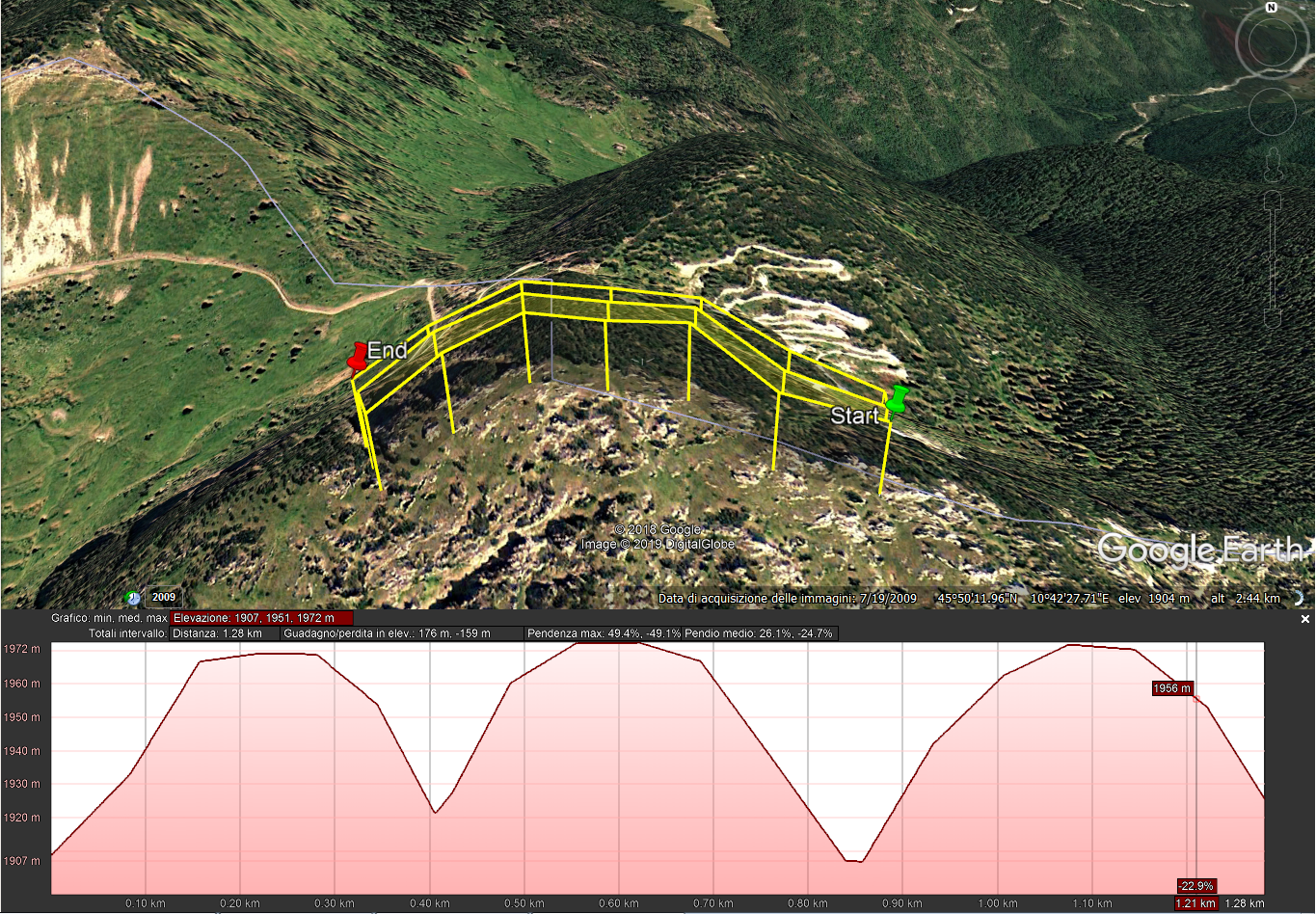
Nel video qui sotto vi porto in Val di Ledro (TN), nella Val Scaglia, dove il Servizio Bacini Montani della Provincia Autonoma di Trento ha realizzato delle opere di ripristino e difesa dalle frane. Si tratta di un versante che sta subendo una forte erosione ed i detriti vengono trasportati a valle dal torrente Assat fino al Lago di Ledro. Le opere realizzate sono volte a limitare questo fenomeno. Dal video sono ben visibili la canaletta principale al centro e quelle laterali a spina di pesce, nonché le palificate vive per il sostegno del terreno. Lungo il torrente sono state realizzate, in tempi non recenti, numerose briglie.
Dal video si capisce come, in pochi minuti, sia stato possibile visionare lo stato delle opere distribuite su un dislivello di oltre 250 m (130 verso l’alto e 120 verso il basso). Con una batteria del Phantom 4 Pro si riesce ad ispezionare una zona molto vasta, tuttavia sarebbe bene farsi dire prima, dai responsabili del progetto, le parti a cui bisogna dedicare maggior attenzione o addirittura farsi accompagnare. In questo caso è utile avere anche un doppio LCD.
In fase di programmazione dell’intervento si sarebbe potuto far ricorso alla fotogrammetria da drone rilevando la zona con una determinata cadenza temporale. In questo modo sarebbe stato possibile determinare il volume di detriti trasportati a valle nel periodo di tempo intercorso tra un rilevo e quello successivo.
In questo articolo descriverò come realizzare un rilievo fotogrammetrico utilizzando i software Metashape Standard della Agisoft e Cloud Compare. Metashape Standard è la versione base del software, infatti ne esiste anche una Professional che ha molte più funzioni e, soprattutto, permette di ottenere dei modelli scalati alle dimensioni reali. La differenza di prezzo tra le due versioni è notevole. Attualmente la versione standard costa 179 dollari, mentre quella Professional 3499 dollari. Cloud Compare, invece, è gratuito ed open source. In calce a questo articolo troverete i riferimenti ad un video nel quale ho mostrato come utilizzare i due software per sviluppare un rilievo fotogrammetrico riportando i risultati ottenuti in termini di accuratezza rispetto ai punti rilevati in loco con uno strumento GNSS. Non posso e non voglio affermare che questi due software rappresentano un’alternativa a soluzioni più complete in quanto ognuno potrà valutare se l’accuratezza ottenuta sia sufficiente per il lavoro che deve svolgere, oppure se sia necessaria un’accuratezza maggiore.
A mio avviso, come spiegato nel video, l’accuratezza del rilievo di prova che ho eseguito può essere migliorata aumentando la sovrapposizione trasversale tra le foto ed editando la nuvola sparsa di punti. Inoltre, un più accurato posizionamento di un paio di Ground Control Points (GCP) avrebbe giovato.
Il procedimento che illustrerò nel video si articola nei seguenti passaggi:
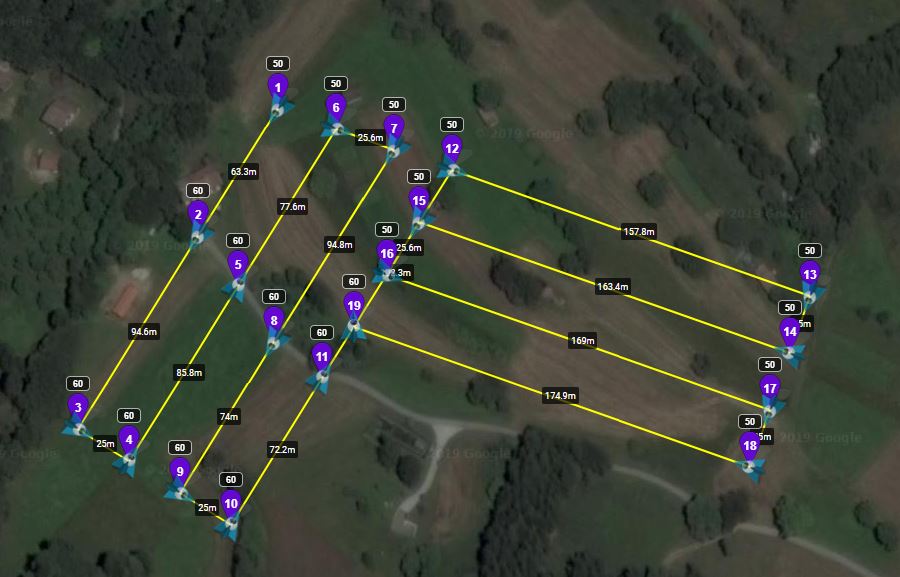
1 – Pianificazione del volo in termini di rotta che l’APR dovrà seguire, intervallo tra gli scatti, GSD, velocità di crociera, sovrapposizione tra i fotogrammi. In questo passaggio ho utilizzato un foglio di calcolo realizzato da me per la pianificazione della missione, il software open source QGIS e Mission Hub di Litchi.
2 – Per l’esecuzione del volo ho utilizzato un Phantom 4 Pro ed ho scattato 211 fotografie che ho elaborato con Metashape Standard. L’allineamento dei fotogrammi non è stato ottimizzato con i Ground Control Points (GCP) in quanto la versione Standard del software non lo permette. Questo implica che la nuvola densa risultante dall’elaborazione conterrà in sé una deformazione non lineare che non può essere corretta. Inoltre, il modello non sarà scalato alle dimensioni reali.
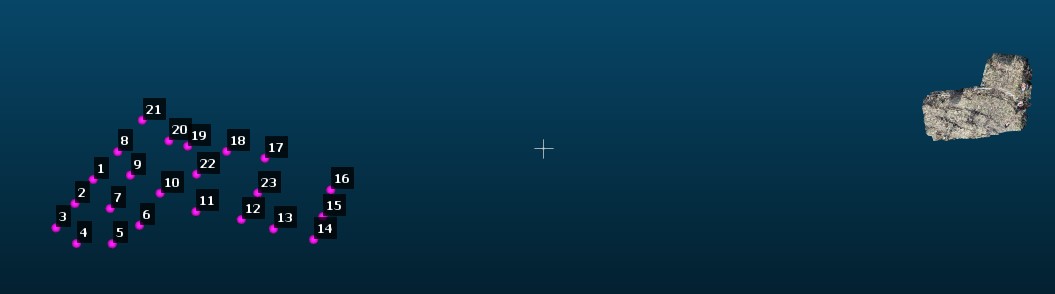
3 – Ho caricato la nuvola densa in Cloud Compare assieme alla “nuvola” dei punti rilevati con lo strumento GNSS. Il software permette di allineare le due nuvole con una trasformazione a sette parametri: tre traslazioni, tre rotazioni ed una variazione di scala. La deformazione non lineare non è risolvibile. Il procedimento di georeferenziazione avviene creando una corrispondenza tra i punti della nuvola (centro dei GCP) ed i punti rilevati in loco.
Nuvole di punti densa e punti rilevati.
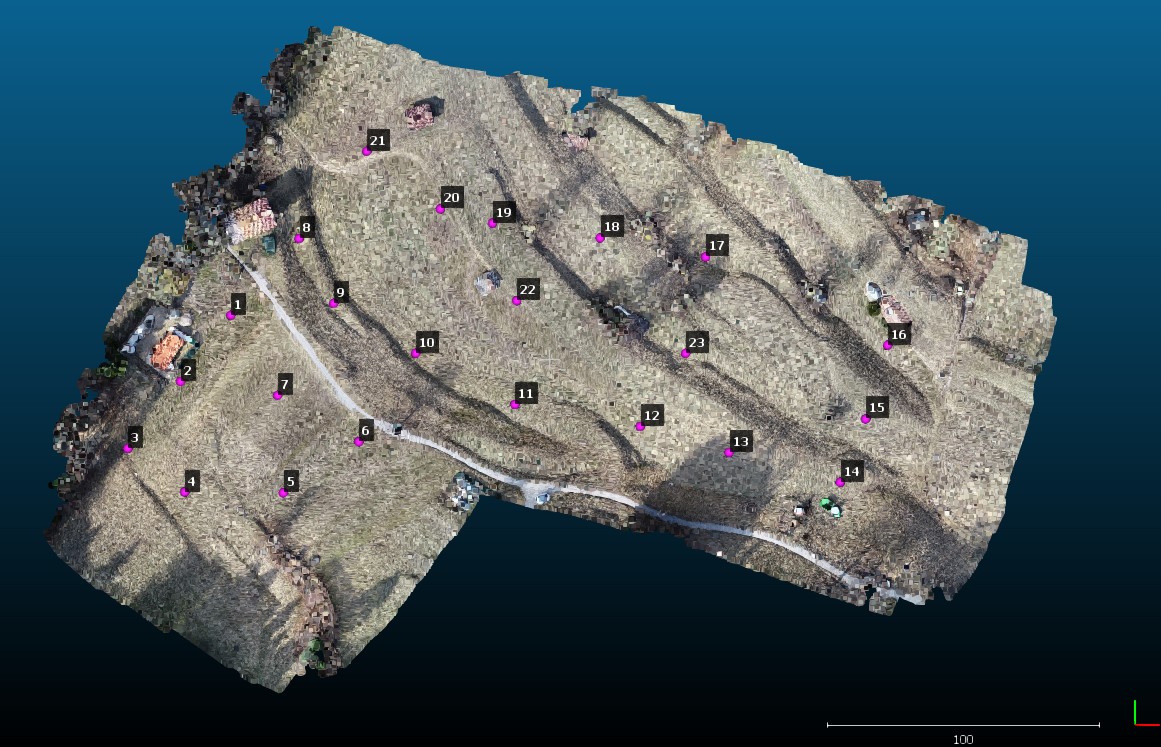
Risultato della georeferenziazione.
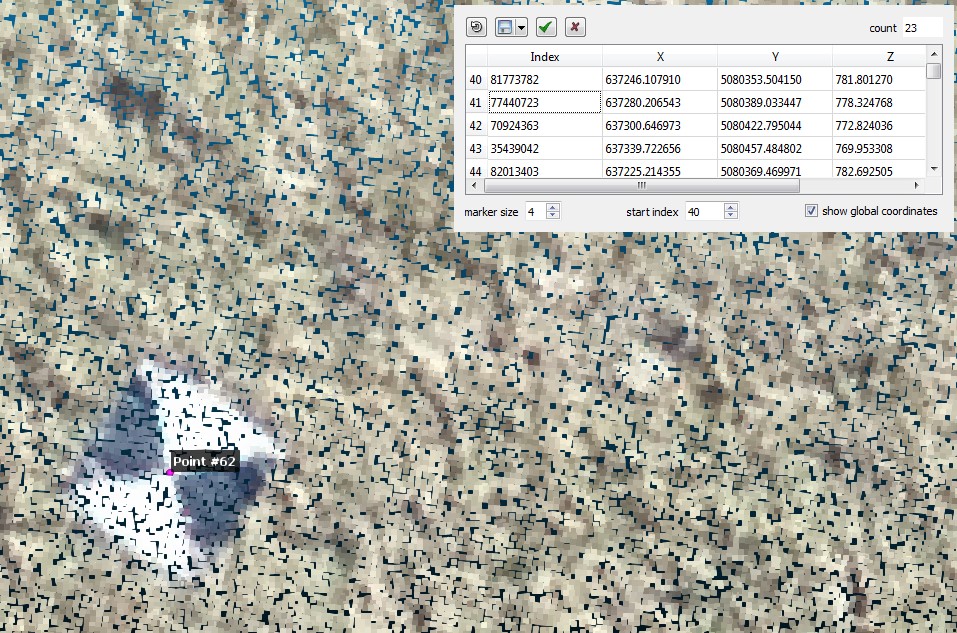
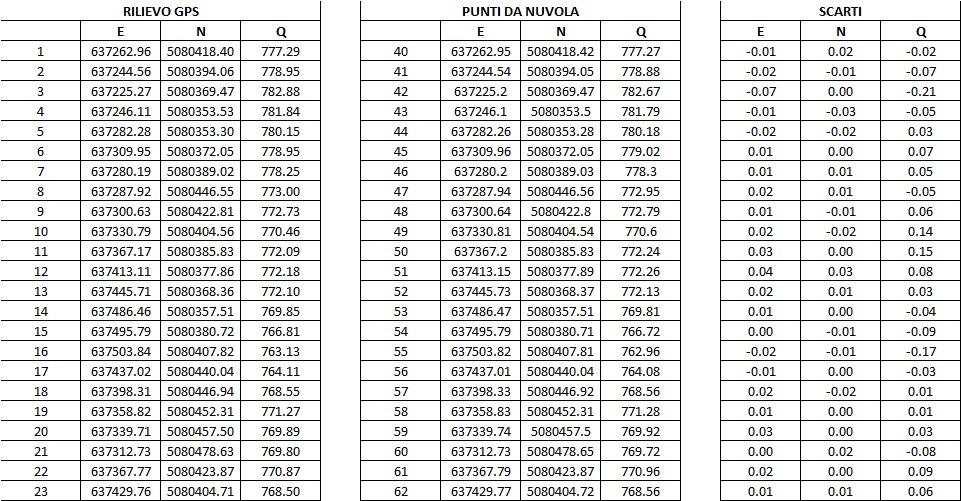
4 – Per determinare l’accuratezza dell’elaborazione del rilievo fotogrammetrico, ho estratto dalla nuvola le coordinate dei GCP.
Poi le ho confrontate con le coordinate dei medesimi punti rilevati con lo strumento GNSS.
A questo punto l’accuratezza del rilevo, almeno in corrispondenza dei GCP, è nota.
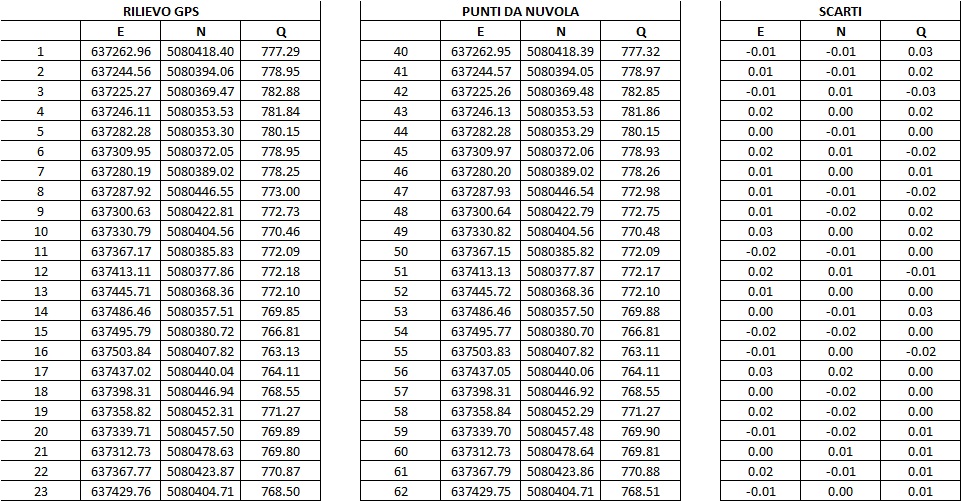
5 – Il passo successivo è stato quello di eseguire l’ottimizzazione dell’allineamento delle foto sfruttando i GCP. Questa funzione, come detto, non è presente nella versione Standard di Metashape, ma nella Professional c’è. La nuvola densa così ottenuta è stata importata in Cloud Compare dal quale ho estratto le coordinate dei GCP mettendole poi a confronto con quelle rilevate.
Come si può notare dal confronto con la tabella riportata al punto 4, gli scarti planimetrici sono più o meno gli stessi, mentre le quote sono state corrette.
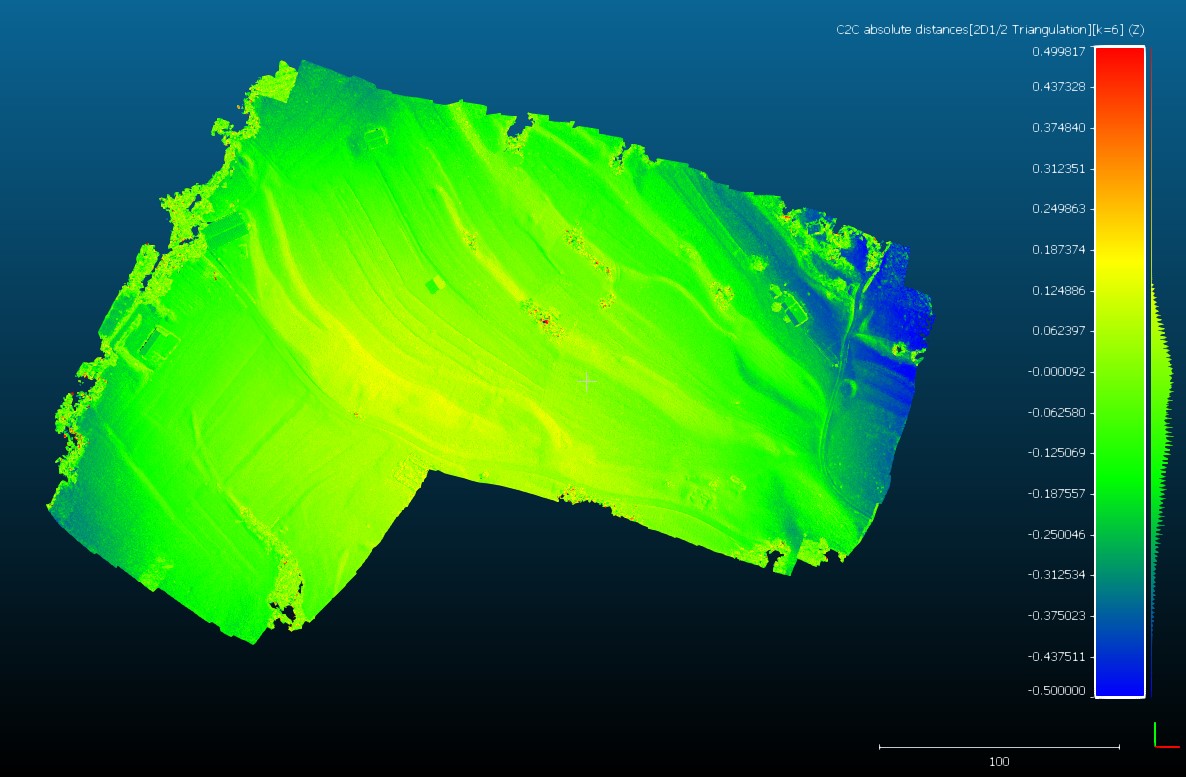
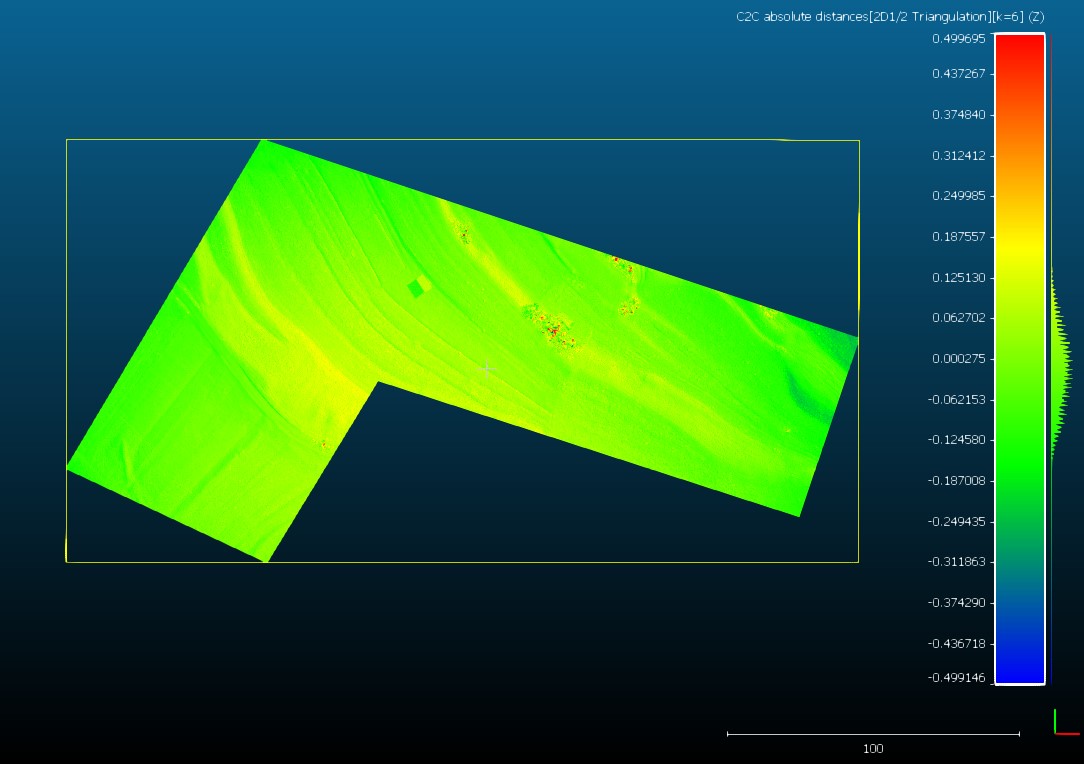
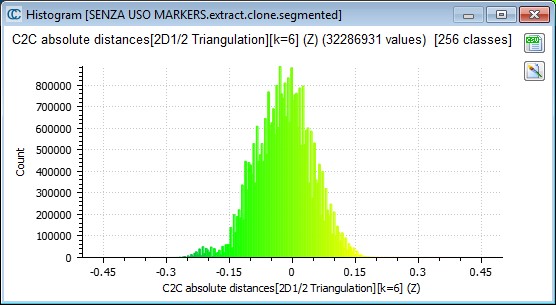
6 – Ho voluto eseguire un’ulteriore prova mettendo a confronto le due nuvole di punti per valutare quanto influisca la deformazione non lineare del modello. Per farlo ho importato le due nuvole in Cloud Compare e gli ho chiesto di determinare la distanza tra le due nuvole separando le tre componenti lungo gli assi cartesiani x, y, z (Est, Nord, Quota).
Distanza tra nuvole lungo l’asse z.Distanza tra nuvole lungo l’asse z nella zona di interesse.
La maggior parte dei punti ha una distanza compresa tra -10 cm e +10 cm dalla nuvola non distorta.
Nel seguito riporto un video che ho caricato su YouTube nel quale mostro l’intero procedimento ed i risultati ottenuti. Come al solito sono ben accetti i vostri riscontri. Intanto vi auguro buona visione.
In questo articolo ti voglio mostrare come, grazie all’intervento di Autocad, sia possibile programmare delle missioni di volo che seguano una rotta generica nello spazio, in particolare una serpentina contenuta in un piano con una determinata inclinazione. Per l’esposizione mi servirò di due video che ho caricato su YouTube in quanto ritengo che sia il modo migliore per mostrare i vari passaggi rimarcando quelli in cui bisogna prestare maggior attenzione. Chiedo perdono per il tono soporifero della mia voce. Il fatto è che, dovendo anche eseguire i vari passaggi al PC, spiegandoli, devo necessariamente andare lentamente. Spero che non vi addormentiate. Per chi vuole solo capire come funziona il procedimento, consiglio di riprodurlo a velocità 1.5x. Chi, invece, vuole seguirmi nei vari passaggi, lo lasci a velocità normale.
Nell’esposizione ho utilizzato una copia antiquata di Autocad, la versione LT 2007. Questo, in realtà, è per mettere in evidenza che gli strumenti necessari per pianificare una missione di questo tipo sono davvero basilari. LT 2007 non gestisce gli oggetti 3D (solidi, superfici, polilinee 3D) e nemmeno l’importazione delle immagini. Per quanto riguarda il disegno in 3D, ho risolto non ricorrendo al tracciamento di polilinee 3D per la rotta, ma utilizzando solo linee e punti. Per quanto riguarda l’importazione dell’immagine di sfondo, invece, ho utilizzato un file generato con Autocad Full nel quale è presente un riferimento esterno ad un’immagine. Tale file può essere aperto anche da LT 2007 ed il collegamento all’immagine può essere ricreato. In calce all’articolo trovate il file .dwg con il riferimento ad un file MAPPA.jpg. Basta salvare l’immagine con tale nome nella stessa cartella del file .dwg ed all’apertura la mappa verrà caricata. Come software topografico utilizzo Sierrasoft Land nel quale potrei importare la mappa georeferenziata e tracciare la polilinea 3D della rotta, tuttavia, se avessi mostrato questo procedimento, sarebbe stato valido solo per i possessori di Land. Per quanto riguarda Autocad LT, invece, immagino che qualsiasi tecnico abbia a disposizione una versione equiparabile o superiore di un CAD. Come spiego nel primo video, l’immagine da importare in Autocad necessita di essere georeferenziata. In un altro articolo/video spiegherò come fare senza ricorrere all’uso di un software topografico. Per quanto riguarda il file Excel per la pianificazione della missione, potete scaricare il file che trovate qui sotto avendo l’accortezza di scambiare i valori inseriti per le dimensioni in pixel del sensore. Detto questo, vi auguro una buona visione.
Con il video successivo rispondo ad un quesito che mi ha posto Luca relativamente alla programmazione della missione di volo utilizzando solo QGIS e Litchi, bypassando, quindi, Autocad. Un grazie a Luca.